1) VTOL - Vertical take-off and landing (VTOL) unmanned aerial vehicle
MAO are in the final stages of development of a 7-meter wingspan heavy lift VTOL RPAS. The platform has been tasked with transporting 60kg of marine sensors from land bases to a maximum distance of 50km over the ocean before transitioning into a stable hover and lowering the sensors into the water below. To achieve the task a patented fixed wing platform has been designed that makes use of two vectored petrol fuelled motors for forward flight and vertical take-off and landing with supporting electric motors offering stability during hovering manoeuvres. The combination of petrol endurance and electric power and responsiveness allows for a VTOL that has endurance, range, and a heavy lift capability.

2) HEAVY LIFT - Heavy lift multi-rotor RPAS
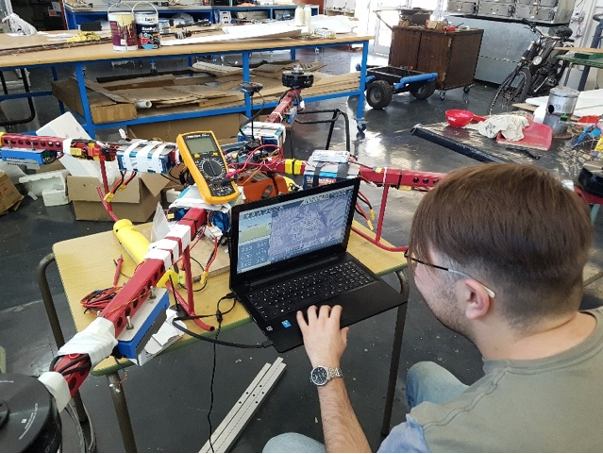
In preparation for the VTOL project a 3-meter diameter multirotor test platform was developed by the MandelaUni Autonomous Operations Group in order to quantify the performance of the stability control system and electric motors of the VTOL. The multirotor proved to be a powerful lift RPAS with a useful payload of 60kg. Further research into hybrid range extenders using a removable petrol driven generator further enhanced the endurance of the RPAS to 2 hours above the electric only endurance.
3. SECURITY - A vision based multirotor aircraft for use in the security industry (with object recognition)
In an attempt to assist with residential security concerns MAO initiated a dual project in 2018 to demonstrate the viability of an autonomous RPAS deployment station in conjunction with a vision based multirotor drone to relay aerial footage of points of security interest. The base station is an enclosed weatherproof base station able to charge the RPAS and act as a relay station between the RPAS and the control centre of the security provider. Once a trigger signal is received from the control centre the drone is uploaded with the co-ordinates of the security concern and automatically deploys from the base station flying to the given co-ordinates. Once overhead the RPAS will relay visual data to the control centre while using AI to assist in the recognition of potential persons of interest informing enroute ground response teams of possible threats.

4) AGRICULTURAL
The Autonomous Ground Vehicle (AGV) under develepment by MAO is aimed at assisting small scale farmers by performing various mundane, repetitive tasks such as weeding, fertilizing and the like. The AGV is battery powered with on board charging from the 330W solar module. The AGV’s deep learning plant database capturing system is currently been tested and refined to maximize detection performance under different environmental lighting conditions. Once fully optimized, this database will be implemented in determining the most appropriate image processing techniques to ensure variety in the deep learning sampling database for training the algorithm.

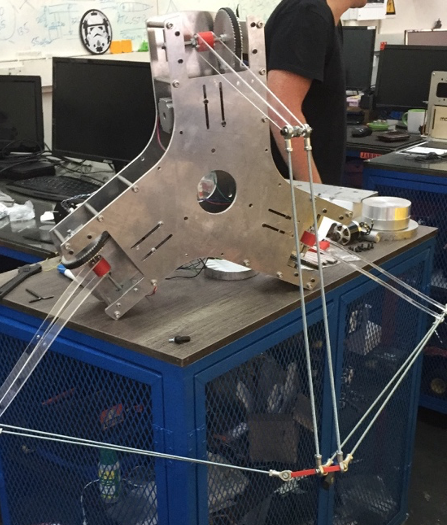
The AGV is fitted with a generic end effector delta robot system for implementation of the desired precision farming techniques. This delta robot has been refined in order to reduce response time to object detection and has been tested to ensure correct motion during object detection. The delta robot’s response and movement were tested with the use of a circle detection algorithm and it was found that the robot successfully detects and transitions to different objects detected. This successful test indicates that once database and deep learning processes have been optimized, plant detection can be seamlessly integrated with the delta robot.
5) COASTAL RECONNAISSANCE
A need has been identified for a long-range unmanned aircraft to patrol the South African coastline for protection of marine resources and for search and rescue operations. The MAO group has commenced design and prototyping of the hardware required for control of a UAV of the required scale. Due to the regulatory challenges associated with flight testing of such a large UAV a phased approach involving trials in a manned aircraft have been proposed to fast track the project.
Phase 1
Retrofit a suitable manned aircraft with autonomous/remotely piloted control systems and demonstrate Search and Rescue as well as Surveillance missions with a monitoring/safety pilot on board the aircraft but with the aircraft controlled remotely. The monitoring/safety pilot will be the pilot in command and be able to take control at any point meaning that the missions can be flown legally and safely in any airspace in the country without the need for complex and lengthy RPAS BVLOS permissions.
Phase 2
Acquire a dedicated aircraft to demonstrate the missions as per phase 1 but with increased payload/range/endurance potential due to the ability to operate without a pilot on board. Demonstrate unmanned flights after obtaining the necessary regulatory permissions.
Phase 3
Engage with a manufacturer to produce an adequate number of fully autonomous aircraft capable of the required applications/missions as BVLOS RPAS aircraft.
Suitable airframes
The criteria considered key to the success of the project are (in order of importance):
-
Low power requirements at loiter speed.
-
Endurance in excess of 8 hrs (preferably 16-20 hrs).
-
High local content.
-
Low acquisition cost.
-
Low operating cost.
-
Corrosion resistance (composite structure).
A Whisper Motorglider aircraft is currently being fitted with hardware to begin phase 1 trials.

Manned aircraft currently being converted to a UAV